

 资讯
资讯
闭(bì)上眼(yǎn),给你不一样的感觉,现在AI人(rén)工智能软体机(jī)器人可以给到(dào)你(nǐ)。
现在科技(jì)越来(lái)越发达,传(chuán)统机械化操作的机器人已(yǐ)经不(bú)能满足现在人类快速的发(fā)展,随(suí)着科技(jì)的不断发展,科(kē)研人员通过(guò)自然界(jiè)的(de)软体生物和传统机器人的启发,陆(lù)续有人创造出对人类快速发展的软体机器人,他们(men)可以去到很(hěn)多人类去(qù)不(bú)到的地方,他们的身体柔软度,给经济(jì)带来进一步(bù)的(de)发(fā)展。
软体(tǐ)机器人模仿章鱼,象鼻,海星等动物而设(shè)计(jì),栩栩(xǔ)如生,他们由软(ruǎn)材料(liào)(硅(guī)胶(jiāo),橡胶)构成,有着天生(shēng)优良的环境适应性以及安全交互性。但是相比(bǐ)于传统机器人,软体(tǐ)机(jī)器人的“感知(zhī)”能力还(hái)远远不足。要真正(zhèng)做(zuò)出“富(fù)有生命(mìng)”的(de)软体机器人,有效的传感是必不(bú)可少的。我们人类或者(zhě)动物的肌肉纤维里缠绕着神经(jīng)纤维,从而可(kě)以直接(jiē)感知肌肉的变形,我们(men)称之为“本体感(gǎn)知能力”。
1. 软体(tǐ)机器人的传感
软体机器人虽然适应性环(huán)境能力强,可以和人安全交互,但是为了能够真正(zhèng)在生(shēng)活生产中应用,能(néng)感知外界环境(jìng)实(shí)为关(guān)键,有了传感信息,机(jī)器人(rén)才能做(zuò)出相应(yīng)的对策,或者检验任务是否已经完(wán)成。毫不夸张的说,如果(guǒ)没有有效的可靠的传(chuán)感方案,软(ruǎn)体机器人只能被限制在实验室中(zhōng)做做展示(shì)了。
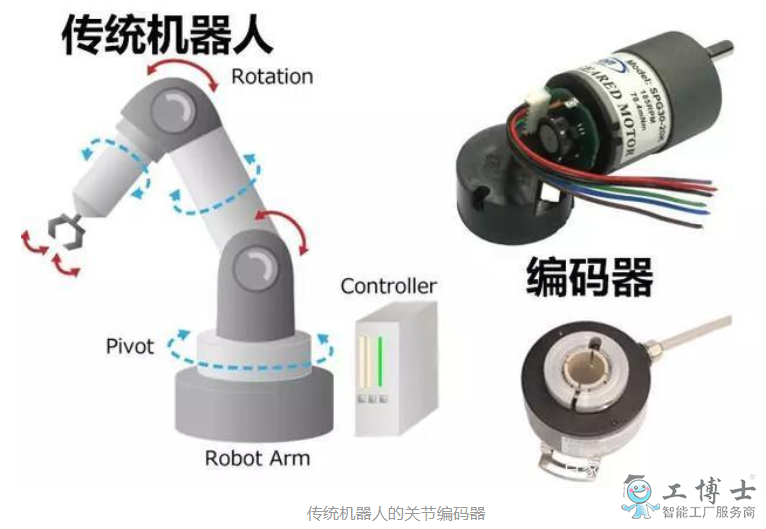
对于传(chuán)统机器人来说(shuō),机器人是由刚(gāng)性的(de)杆件和旋转(zhuǎn)关节构成,用旋转编码器得(dé)到关(guān)节转角就可以计算出来当前机器人(rén)的姿态。
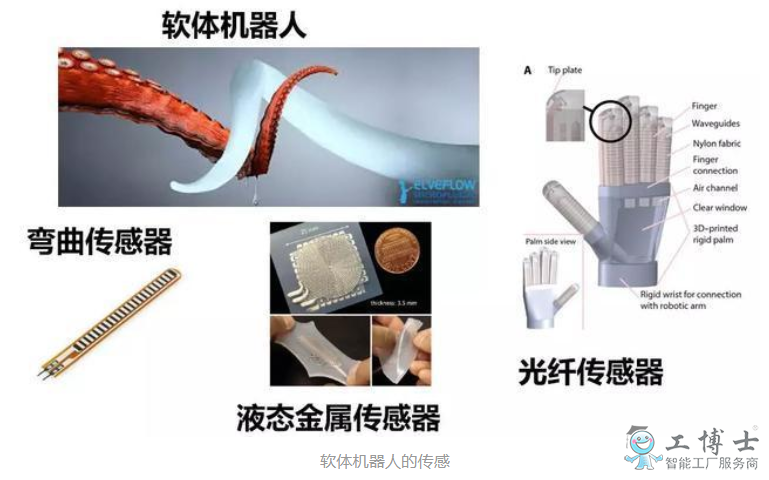
但是软体机器人而言,材料(liào)柔(róu)软的特(tè)性让软体机器人本体的形状变得极难预(yù)测,尤其(qí)是受到外力影(yǐng)响的情况下。科学家们已经设(shè)计出多种有效的软体机器人(rén)传感器(qì)(例如液态金属,光纤,导电聚合(hé)物)。想(xiǎng)要完全的表征一个(gè)软(ruǎn)体机(jī)器人的形(xíng)变(biàn)信息,仅仅(jǐn)依靠一两(liǎng)条/片传感器是比(bǐ)较难实现的,需要更复杂更(gèng)科(kē)学的传感(gǎn)器分(fèn)布设计。目前(qián)的大(dà)多数研究都是根据经验人为的对传感器的分布(bù)进行设计,考虑到软体机器人的“多自由(yóu)度特性”的复杂性,人为的设(shè)计传感器的尺寸和分布会(huì)越(yuè)来越艰(jiān)难。

来自迪士尼(ní)研究院(Disney Research)以(yǐ)及雷伊·胡安·卡洛斯大学(UniversidadRey Juan Carlos)的科学家们尝试设计出一种传感(gǎn)器系统来重构软体(tǐ)机器人的本体(tǐ),他们指出(chū),传感器的数量,以(yǐ)及放置(zhì)传感器的(de)最佳位置是两个(gè)重要(yào)的问(wèn)题。研究者(zhě)们提出了一种算法技(jì)术,可以(yǐ)由软件自动地设计“拉伸型传感(gǎn)网络”的尺(chǐ)寸(cùn)和分布,从而为任意形状(zhuàng)和尺寸(cùn)的软体机器人增加“本体感(gǎn)受”的能力(lì)。他们的(de)方法已经能够让软(ruǎn)体(tǐ)机器人感(gǎn)受自身(shēn)的变形状态以及感(gǎn)受在外界(jiè)交互下的形变。
在该研(yán)究中给出(chū)了三(sān)个具有本体感知能力的应(yīng)用实例,一个长方(fāng)体的(de)弹性棒,一个(gè)气动的软(ruǎn)体机械手指,还有一章鱼触手(shǒu)(只有仿真)。我们先来欣赏一下这几种(zhǒng)软体机器人例子。
长方体棒展示
软体(tǐ)手指展示(shì)
章(zhāng)鱼触手(仿真)展示
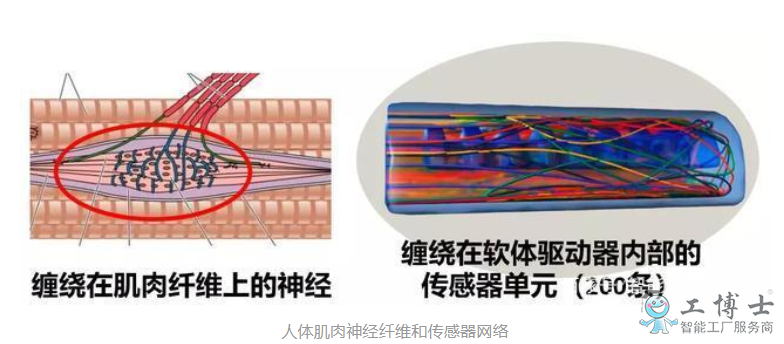
我们(men)的肌肉纤(xiān)维(wéi)上缠绕了一圈圈的神经纤维,它(tā)们可以检测肌肉的(de)长(zhǎng)度变(biàn)化啊,从而让我们感知身(shēn)体(tǐ)每一处(chù)的姿势。在这个研究中,科学家们采用了一种类似的设计(jì)方法,他(tā)们用(yòng)一(yī)种(zhǒng)常见(jiàn)的应变传(chuán)感器单元,这种传感器是由(yóu)弹性的空心硅胶管(guǎn)制成,在里(lǐ)面充满了共晶镓-铟(EGaIn,一种液态合金)。该传感器(qì)的建模(mó)相对(duì)比(bǐ)较简单,可以通过(guò)计算硅胶管长度/截面的变化来计算电阻的变(biàn)化(huà)。研究者(zhě)们把大量的这种细(xì)长的传感器作为一个(gè)个类似于(yú)神(shén)经纤维的单元(yuán)集(jí)成(chéng)到软体机器人身体(tǐ)里(通常是用硅胶浇注(zhù)法,在后文中的(de)气动软体驱动器中有介绍(shào)具体制造方法)。
弹(dàn)性应变传感(gǎn)器
2. 传感器网络优化的(de)算(suàn)法
为了让大(dà)量的传感器最优化(huà)分布,研究者(zhě)们提出了一种用于优化应变传感器分布和(hé)尺寸设计的算法。
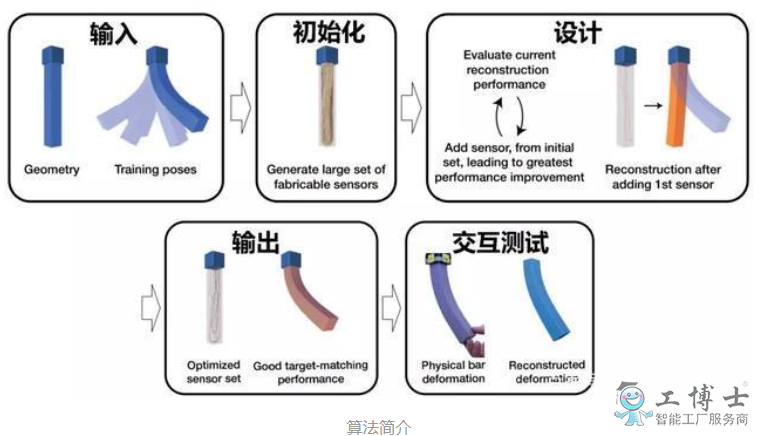
首先是要在计算机中设计出软体机器人弹性(xìng)体(tǐ)的几何模(mó)型(xíng),然后利用这(zhè)个模型进行一系列的不同形态的模(mó)拟交互训练。接下(xià)来研究者根据(jù)交(jiāo)互训练中弹性体的应(yīng)变场分布(应变场分布有(yǒu)模拟交互得(dé)到)来生成一大组可以选择的合(hé)理(lǐ)的传感器路径,这些传感器路(lù)径对(duì)于外界的输入都非常(cháng)敏感(研究者发现,在最开始(shǐ)集成200个候选传感器足以(yǐ)在各个不同的方向表(biǎo)示物(wù)体)。接着(zhe)通过连续(xù)迭(dié)代优化算(suàn)法来选出最优的一组传感器分布(bù)的方(fāng)式,从而(ér)大量的减少传感器的数(shù)量。最终根据得(dé)到(dào)的传感器路径来制造样机进(jìn)行测试。
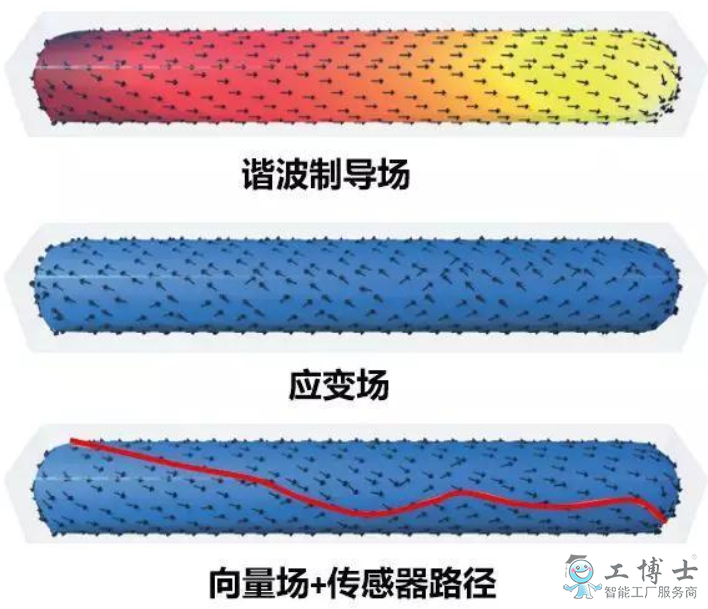
传(chuán)感器路径的(de)选(xuǎn)择
关于(yú)传感器路径的选择,研究(jiū)者制定(dìng)了三个约束:1. 选择的路径一定要是可以被加工(gōng)的;2. 路径一定要有一(yī)定的(de)随机性;3. 每一个(gè)传感器一定要(yào)跟(gēn)随着应变场,从而(ér)能够最(zuì)大(dà)化传感器的(de)敏感度。

传感(gǎn)器数量筛(shāi)选算法
为了(le)从初始(shǐ)组合(hé)200个传感(gǎn)器中筛(shāi)选出最好的一组传(chuán)感器,研究者使用一阶优化约束算法来实(shí)现传感器最优组合的筛选。
3. 本体感知(zhī)传感器设计应用(yòng)案例
如(rú)前面(miàn)动(dòng)态图(tú)所(suǒ)展示的,作者通过两个实体的例子和一(yī)个仿真的例子来展示(shì)他们(men)算法(fǎ)的可(kě)行性。
首(shǒu)先(xiān)是一个可以多向弯曲的弹性(xìng)棒。弹性棒的一(yī)被固定(dìng),另一(yī)端和外界(jiè)有交互(用手指控制它朝(cháo)着各个(gè)方向弯曲)。研究者(zhě)利用算法把200个初(chū)始的传(chuán)感器网络缩(suō)减到了只含有5个传感器(qì)的最优组网络(luò)分布。仅仅借助于这5个传感器的信息(xī),就可以重构该(gāi)弹性棒在相(xiàng)应的(de)外界作用下的变形情(qíng)况,重构效果有着惊人的准(zhǔn)确度。
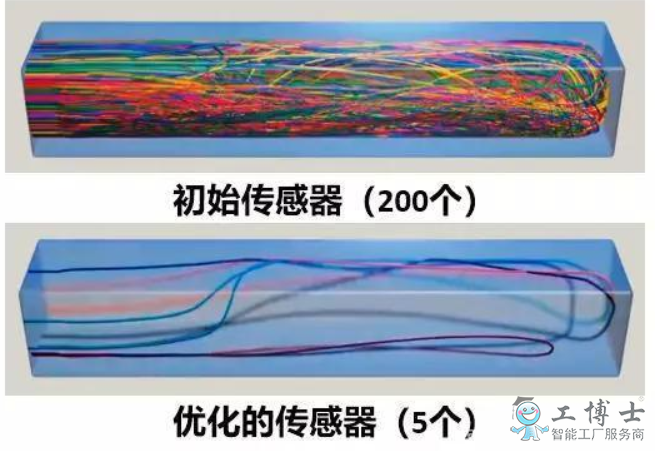
初(chū)始传(chuán)感器组和优化的传感器组

实(shí)体交互展(zhǎn)示和对应的(de)模(mó)型重构
除了简单的实心的棒,有气腔的(de)复杂的(de)气动(dòng)软体驱动器也可以用这种(zhǒng)方式来(lái)实(shí)现本体感知的(de)效(xiào)果(guǒ)。针对于一个常见的(de)半圆形截面的气动(dòng)软体手指(zhǐ),研究者先用算法(fǎ)在气腔周围生成了200个可(kě)制(zhì)造的传感器网络,然后用优化模(mó)型缩减到仅剩9到10个传感器网(wǎng)络。

初始传(chuán)感器(qì)分布和优化后的传感(gǎn)器分布
为了均衡制造难(nán)度和精确性(xìng),研究者们最终采用了6个传(chuán)感器的设计。下图给出(chū)了(le)集(jí)成传感器的软体(tǐ)机器人的制造方式。3d打印出传感器网络(luò)的模具,用硅(guī)胶铸模(mó)的(de)方式,在驱动器(qì)表(biǎo)明留(liú)下细小的凹槽,把空心硅胶管铸(zhù)进去(qù),然后再铸一层硅胶来固定空心硅胶(jiāo)管(guǎn),最终在硅胶管里注入(rù)液态金属,接上导线(xiàn),即可得到一个“本(běn)体(tǐ)感知”的软体驱动器(qì)。

带(dài)有本体感(gǎn)知(zhī)能力(lì)软体驱(qū)动器的加工
研究者用两种不同的变(biàn)形模式来检验(yàn)本体感知的性能。一(yī)个(gè)是自由膨胀,另一个(gè)是在膨胀过程中受到圆柱体的阻挡(dǎng)。可以看出(chū),图中显示了实(shí)体的变形和重(chóng)构的(de)模(mó)型有着良好的重叠性。

自(zì)由充气形(xíng)变和被阻挡的(de)充气形变
为了验证所提出的方(fāng)法也适用于仿生机器人设计,研究者仿真(zhēn)了一个(gè)章鱼触(chù)手。优化(huà)后(hòu)的(de)结果能够(gòu)准确(què)的重(chóng)构章鱼触手在复杂的外界接触(chù)的模型(颜色代(dài)表模拟值(zhí)和重构值之间(jiān)的误(wù)差)。
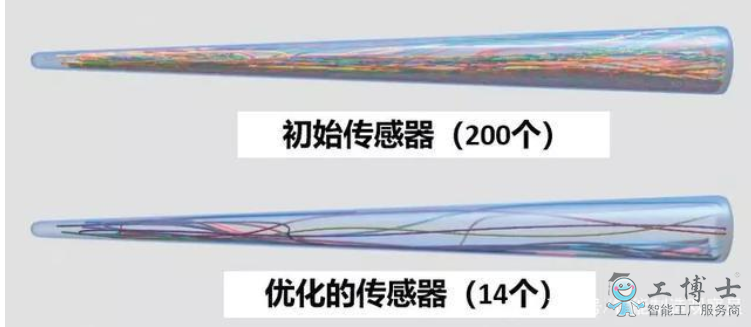
章鱼触手(shǒu)传感器数量的优化
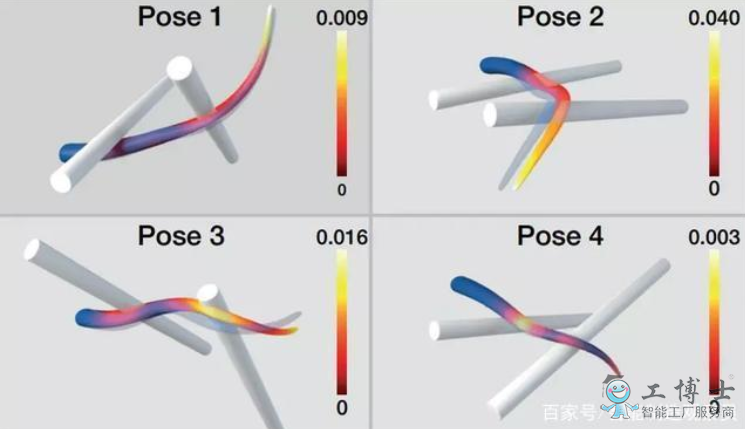
仿真模型和重构模型对比
4. 总结(jié)与展望
集成本体感知能力让本来就具有(yǒu)众多优良性能的软(ruǎn)体机器(qì)人变得更加强大。当一个软体机械(xiè)手具有了本(běn)体感知能(néng)力,它(tā)不仅仅能够感知一个物体是(shì)否被(bèi)抓起,更能够直接感知(zhī)所抓起物体(tǐ)的形状。本研究中(zhōng)的科(kē)学(xué)家们提出的传感器的设计及优化的(de)方法能够很好地重构软(ruǎn)体机器(qì)人的状态,从而进一步提升(shēng)了软体机器人的可(kě)靠性以及实用(yòng)性。能够对于外界的交互进行感知,让软体机器人如虎添翼,相信在不久的将(jiāng)来,软体机器人会逐步走入大(dà)家的生活。
软体机(jī)器人已经有了进一步的突破,但目前还是有很多的不足需要(yào)改进,我相信,在未来的不断研究中,可(kě)以创造出能(néng)像人一样的软体机器人。










")
息")
举报中心")
