

 资讯
资讯在浩瀚无边的海洋世界里,有一(yī)种鱼拥有巨大(dà)的“羽翼”,像自带光环的礼服侠(xiá),它就是蝠鲼,也(yě)被(bèi)称为“魔鬼鱼”。作为自然界最高效的游泳(yǒng)者之一,蝠(fú)鲼几乎能毫不(bú)费力(lì)地在水中滑翔,甚至(zhì)在湍急水流中也能(néng)敏捷地来回游动。
大(dà)自然为机器人(rén)的发展提供了巨大支持。近日,中国科学院沈阳自动化研究所(suǒ)类生命(mìng)机(jī)器人研究团队(duì)以蝠鲼为设计灵感(gǎn),研发了一(yī)种由体外培(péi)养的(de)骨骼肌组织(zhī)驱动、环形分布多(duō)电极(CDME)控制的类生命游(yóu)动(dòng)机器人,这(zhè)个机器人(rén)仅由一块肌肉组(zǔ)织驱动就可实现有效推进。
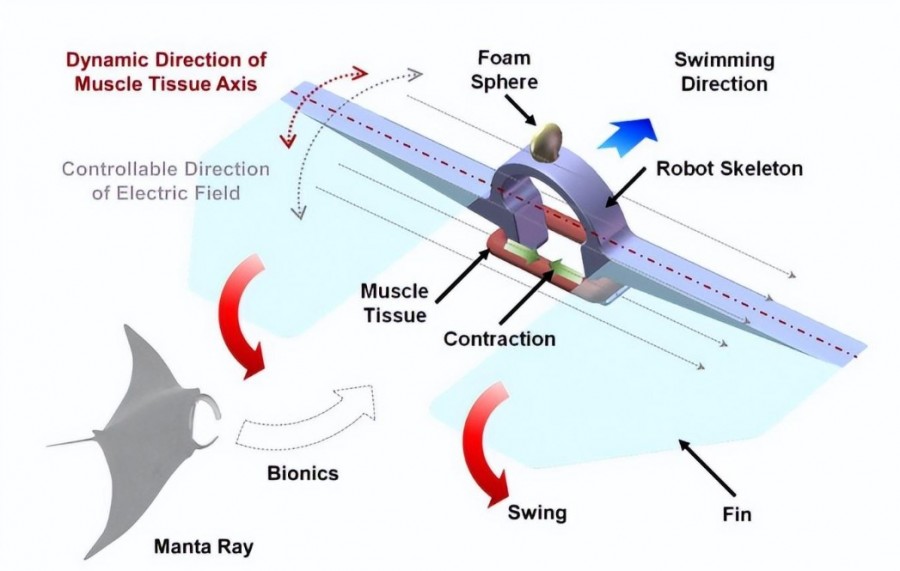
仿蝠鲼类生(shēng)命机(jī)器人示意(yì)图
仿(fǎng)生学是重要的机器人研究方法之一,通过模仿自然生物(wù)的(de)结(jié)构和行为(wéi)来提高机(jī)器人的运动学性能。而类(lèi)生命机(jī)器人(rén)以天然生(shēng)物(wù)材料为机器人核心要素,是(shì)仿生学的(de)进一步发展。例如(rú),一些活(huó)体细胞已经被用于实现机器人的(de)部分功(gōng)能,包括(kuò)感知(zhī)、控制、驱动等,其中驱(qū)动(dòng)作(zuò)为决定其性能的关键因(yīn)素(sù),关(guān)系(xì)到机器人的整(zhěng)体性能。然而要进(jìn)一步发展类生命机器人(rén)的可控运动性能,还需要创新推(tuī)进方式和控制方法。针对以上难题,研究人员提出了一(yī)种基于CDME的动态控制方法。该项研究以论文《基于动态(tài)电(diàn)刺激的“仿蝠鲼类生命(mìng)机(jī)器人(rén)”》(A Manta Ray-Inspired Biosesyncretic Robot with Stable Controllability by Dynamic Electric Stimulation)发(fā)表在(zài)期刊(kān)《类生命系统》(Cyborg and Bionic Systems)上。

论文具体信息
研究团(tuán)队发现,CDME产(chǎn)生的电场对(duì)培养(yǎng)基和(hé)细胞的伤害(hài)要(yào)比传统平(píng)行板电极要小(xiǎo),并且使用该方法(fǎ)可动态(tài)控制所产生的(de)电场方(fāng)向,使(shǐ)其(qí)与机器人的驱动组织保持实时平行,进(jìn)而保(bǎo)证(zhèng)机器人的(de)稳定可(kě)控性。
在材料与结构方(fāng)面,研究团(tuán)队根据蝠(fú)鲼(fèn)的结(jié)构设计了机器人的本(běn)体骨架,并选(xuǎn)用聚(jù)二甲基(jī)硅(guī)氧烷(PDMS)作为结(jié)构的主要材料(liào)。为了方(fāng)便将(jiāng)驱动组织和(hé)机器人骨(gǔ)架结构进行装(zhuāng)配,研究人员选择(zé)了以成肌(jī)细胞为核心所制(zhì)造的环形组织(zhī)作为(wéi)机器人的驱(qū)动部(bù)分。

三维肌肉驱动组(zǔ)织制作方法示意图
为获(huò)得具有有效收缩力的环形肌肉组(zǔ)织(zhī),研究人员利用CDME的旋(xuán)转电刺激实现成肌细(xì)胞向可收缩肌管的均匀诱导分(fèn)化。此外,为控(kòng)制(zhì)机器人以理想速度(dù)游动,他们还在装(zhuāng)配机器人之前测量了在不同电刺(cì)激下(xià)肌肉组织的收缩(suō)力。
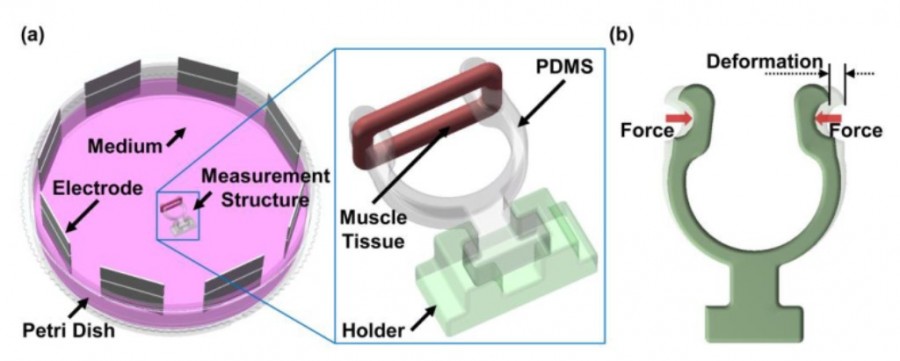
肌肉组织测量示意图(tú)。(a)肌肉(ròu)组织驱动的PDMS测量(liàng)结构示意图(tú);(b) PDMS结构在驱动力(lì)作用下的形变模(mó)拟图(tú)。
在验证机器人(rén)的(de)稳定可(kě)控性方面,为(wéi)控制类生命机器人以(yǐ)理想的速度(dù)游动,研究团队利用仿真方法分(fèn)析(xī)了机(jī)器人的运动(dòng)性能与驱(qū)动组织收缩力之间的关系。
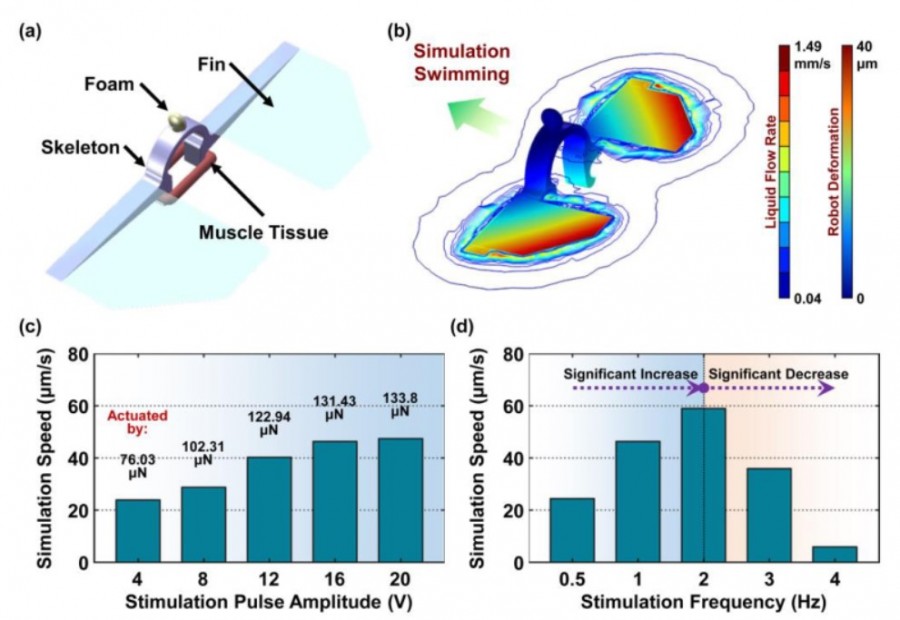
类(lèi)生命机器人游动仿真。(a)类生命(mìng)机(jī)器人模型;(b) 机器人游动仿(fǎng)真图;(c) 不同(tóng)刺激电压下机器人游动(dòng)仿真结果(guǒ);(d) 不同刺激频率下机器人游动仿(fǎng)真结果。
为了展(zhǎn)示所提出的类生命机器人的(de)稳(wěn)定可(kě)控运动,研究(jiū)人(rén)员(yuán)采用所提出(chū)的动(dòng)态电刺激方法实现了机器人以不同(tóng)速度进行可(kě)控游动。

基(jī)于CDME的类(lèi)生命机器人动态控制方法示意(yì)图

类(lèi)生命(mìng)机器人游动(dòng)速度与电刺(cì)激幅值和频率的关系
在实验中,机(jī)器人展示了有效的游动和稳定的可(kě)控性,验证了研(yán)究(jiū)团队(duì)提出的仿生设计和(hé)基于CDME控制方法的有效性(xìng)。
论文指(zhǐ)出,该项研(yán)究所提出的仿生设计(jì)与(yǔ)驱动控(kòng)制(zhì)方法不但可以促进类(lèi)生命机器人的进一步发展,而且对软体(tǐ)机器人的仿生(shēng)设计、肌肉组织工程等相关领域也有一定的潜在指导意义。
不过,现阶段的类生命(mìng)机器(qì)人虽然已实现了有效的可控(kòng)运动,但仍有许多(duō)关键的瓶颈需要被突破。例如(rú),所制造的机器人尺寸大多为厘米级,难以应(yīng)用于体内药物运输等场景。因此(cǐ),面向微纳(nà)生物结构的3D打印、柔性(xìng)操作等技术是开发应(yīng)用于临床等特殊环境的类生命微型机器人(rén)的关键。此外,现(xiàn)有的(de)类生命机器人大多(duō)依靠外部人工刺激实现可控运(yùn)动,缺乏自主(zhǔ)性。因此,基于活(huó)体细(xì)胞的(de)感(gǎn)知(zhī)与控制方法可应(yīng)用(yòng)于类(lèi)生命机(jī)器人研究,进而实现(xiàn)基(jī)于环境信息感知的机器人自主运动。
据悉,《类生命系统》是(shì)北(běi)京理工大学与美国科学促进会(AAAS)/Science 共同打(dǎ)造的高水平国际英(yīng)文科技期刊,入(rù)选“中国科技期刊卓越行动计划高起(qǐ)点新刊(kān)”项目。
该论文作者(zhě)张闯是中科(kē)院沈(shěn)阳自动化研究所副研究员,一直(zhí)专(zhuān)注于机电系(xì)统与(yǔ)生命(mìng)系统交叉融(róng)合(hé)研(yán)究。主持NSFC青年科(kē)学基(jī)金项目、中国博士后科学基金面上项(xiàng)目、中科院基础培育基金(jīn)项目、中科院特别研究助理资助项目、辽宁(níng)省博士启动基金等(děng);获得(dé)中科(kē)院院长特别奖,研究成(chéng)果入选中国智能(néng)制造十大科技进展(zhǎn)、中国(guó)机器(qì)人行业年会“科学引领奖”等。










察")
息(xī)")
举(jǔ)报中心")
110")